Hãy nhập câu hỏi của bạn vào đây, nếu là tài khoản VIP, bạn sẽ được ưu tiên trả lời.

Đáp án A
Với hai dao động ngược pha, ta luôn có x 1 x 2 = A 1 A 2 → E t 1 E t 2 = A 1 A 2 2 ↔ E 1 − 0 , 56 0 , 08 = 4 → E 1 = 0 , 88 J .
Đáp án A
Với hai dao động ngược pha, ta có: x 1 x 2 = A 1 A 2 = 2 → x 1 x 2 2 = E t 1 E t 2 = 4
Theo giả thuyết bài toán, ta có: E 1 − 0 , 48 0 , 04 = 4 E 1 − 0 , 04 E 2 t = 4 → E 2 t = 0 , 15 J
![]()
![]()
Bình luận: Để nhanh chóng tìm được kết quả ta chuẩn hóa nhanh như sau
*Lập tỉ giữa 2 trong 3 phương trình trên ta được:
Hướng dẫn:
Nhận thấy rằng với cách kích thích bằng va chạm cho con lắc lò xo nằm ngang, chỉ làm thay đổi tần số góc của hệ (do m thay đổi) chứ không làm thay đổi vị trí cân bằng của hệ.
+ Vị trí vật có thế năng bằng 3 lần động năng thì x = ± 3 2 A và v = 0,5ωA.
Sau va chạm con lắc mới tiếp tục dao động điều hòa với tần số góc ω ' = k m + m = ω 2
+ Quá trình va chạm động lượng theo phương nằm ngang của hệ được bào toàn → v′ = 0,25ωA.
→ Biên dộ dao động mới của con lắc A ' = x ' 2 + v ' ω ' 2 = 3 2 A 2 + V 0 ω ' = 14 4 A
Đáp án B
Đáp án A
Tại vị trí động năng bằng lần thế năng, ta có

tốc độ của vật sau va chạm là

. Sau va chạm vị trí cân bằng của hệ không thay đổi, tần số góc của dao động giảm đi 2 lần, biên độ dao động với của vật




Đáp án D
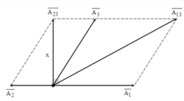
Biểu diễn vecto các dao động.
+ Ta có E 1 = 2 E 2 E 13 = 3 E 23 → A 1 = 2 A 2 A 13 = 3 A 23
Để đơn giản, ta chọn A 2 = 1 A 23 = x → A 1 = 2 A 13 = 3 x
+ Từ hình vẽ ta có 3 x 2 = x 2 + 1 + 2 2 → x = 1 + 2 2
Vì x 1 ⊥ x 23 nên biên độ của dao động tổng hợp của vật là A 2 = A 23 2 + A 1 2 = 1 + 2 2 2 + 2 2
→Ta có E E 23 = E W = A 2 A 23 2 = 1 + 2 2 2 + 2 2 1 + 2 2 2 ≈ 1 , 7
ĐÁP ÁN A